

Rotation d’un solide | Abscisse angulaire, vitesse angulaire
🔄 Mouvement de rotation d’un corps solide autour d’un axe fixe
📌 Définition : Mouvement de rotation autour d’un axe fixe
📐 1.1 Repérage d’un point d’un solide en rotation
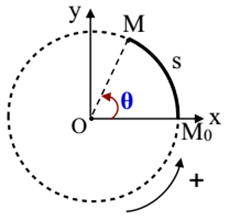
Pour décrire la position d’un point M du solide à l’instant \( t \), on utilise :
- L’abscisse angulaire \( \theta(t) = \widehat{(\overrightarrow{OM_0}, \overrightarrow{OM})} \) (angle repéré par rapport à une direction de référence).
- L’abscisse curviligne \( s(t) = \overset{\frown}{M_0M} \) (longueur de l’arc parcouru sur le cercle de rayon \( R \)).
⚡ 1.2 Vitesse angulaire
- \( \omega > 0 \) → rotation dans le sens trigonométrique (sens positif choisi).
- \( \omega < 0 \) → rotation dans le sens horaire.
📏 Relation entre vitesse linéaire et vitesse angulaire
La vitesse linéaire est donc d’autant plus grande que le point est éloigné de l’axe.
📈 Accélération angulaire
Dans le cas d’un mouvement de rotation uniformément varié (\( \alpha = \text{constante} \)) : \[ \omega(t) = \alpha t + \omega_0 \quad ; \quad \theta(t) = \frac12 \alpha t^2 + \omega_0 t + \theta_0 \]
1.3 Accélération angulaire
L’accélération angulaire \(\ddot{\theta}\) est la dérivée par rapport au temps de la vitesse angulaire :
\[ \ddot{\theta} = \frac{d\dot{\theta}}{dt} = \frac{d^2\theta}{dt^2} \]
Elle s’exprime en : \[ \text{rad.s}^{-2} \]
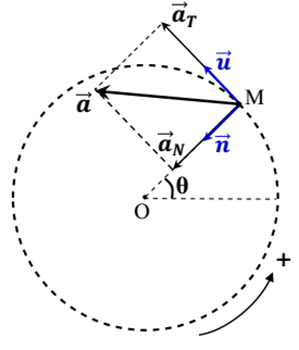
Dans la base de Frenet, le vecteur accélération s’écrit :
\[ \vec{a} = a_T \vec{u} + a_N \vec{n} \]
Tel que :
Et puisque :
\[ V = R\dot{\theta} \]
alors :
4 Les équations horaires du mouvement
2.4 Mouvement de rotation uniforme
On dit qu’un mouvement de rotation est uniforme si :
\[ \omega = \dot{\theta} = \text{Cte} \]
c’est-à-dire :
\[ \ddot{\theta} = 0 \]
Équation horaire du mouvement :
avec :
\[ \theta_0 = \theta(t=0) \]
📋 Analogie entre translation et rotation
| Grandeur | Translation (ligne droite) | Rotation (autour d’un axe fixe) |
|---|---|---|
| Position | \( x(t) \) (m) | \( \theta(t) \) (rad) |
| Vitesse | \( v = \dot{x} \) (m/s) | \( \omega = \dot{\theta} \) (rad/s) |
| Accélération | \( a = \dot{v} \) (m/s²) | \( \alpha = \dot{\omega} \) (rad/s²) |
| Lien distance – angle | — | \( s = R\theta \), \( v = R\omega \), \( a_t = R\alpha \) |
✏️ Exercice d’application
Un disque tourne autour de son axe central. Un point situé à \( R = 0,20 \, \text{m} \) de l’axe a une vitesse linéaire \( V = 1,5 \, \text{m/s} \).
- Calculer la vitesse angulaire \( \omega \) du disque.
- Quelle est la vitesse linéaire d’un point situé à \( R’ = 0,35 \, \text{m} \) ?
🔍 Voir correction
2. \( V’ = R’ \cdot \omega = 0,35 \times 7,5 = 2,625 \, \text{m/s} \).
✔ Tous les points ont la même vitesse angulaire, mais la vitesse linéaire augmente avec la distance à l’axe.
1.3 Accélération angulaire
L’accélération angulaire \(\ddot{\theta}\) est la dérivée de la vitesse angulaire par rapport au temps :
\[ \ddot{\theta} = \frac{d\dot{\theta}}{dt} = \frac{d^2\theta}{dt^2} \]
Elle s’exprime en : \[ \text{rad.s}^{-2} \]
Dans la base de Frenet, le vecteur accélération s’écrit :
\[ \vec{a} = a_T \vec{u} + a_N \vec{n} \]
Avec :
\[ \left\{ \begin{aligned} a_T &= \frac{dV}{dt} \\ a_N &= \frac{V^2}{R} \end{aligned} \right. \]
Or :
\[ V = R\dot{\theta} \]
Donc :
\[ \left\{ \begin{aligned} a_T &= R\ddot{\theta} \\ a_N &= R\dot{\theta}^2 \end{aligned} \right. \]
4 Les équations horaires du mouvement
2.4 Mouvement de rotation uniforme
Un mouvement de rotation est dit uniforme si :
\[ \omega = \dot{\theta} = \text{Cte} \]
donc :
\[ \ddot{\theta} = 0 \]
L’équation horaire du mouvement est :
avec :
\[ \theta_0 = \theta(t=0) \]
2.5 Mouvement de rotation uniformément varié
Un mouvement est uniformément varié si l’accélération angulaire est constante :
\[ \ddot{\theta} = \text{Cte} \]
Équation horaire de la vitesse :
avec :
\[ \dot{\theta}_0 = \dot{\theta}(t=0) \]
Équation horaire du mouvement :
avec :
\[ \theta_0 = \theta(t=0) \]
5 La relation fondamentale de la dynamique (RFD)
3.1 Moment d’une force (Rappel)
Le moment d’une force \(\vec{F}\) par rapport à un axe \((\Delta)\) est le produit de l’intensité de cette force et de la distance \(d\) séparant la droite d’action de la force et l’axe de rotation.
\[
M_{\Delta}(\vec{F})
=
\pm F \cdot d
\] 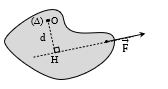
avec :
\[ d = OH \]
Le signe \((\pm)\) dépend du sens positif de rotation.
4.3 Énoncé de la relation fondamentale de la dynamique
Dans un référentiel galiléen, la somme des moments des forces appliquées à un solide en rotation autour d’un axe fixe \((\Delta)\) est égale au moment d’inertie du solide multiplié par l’accélération angulaire :
Avec :
- \(J_{\Delta}\) : moment d’inertie du solide \[ (\text{kg.m}^2) \]
- \(\ddot{\theta}\) : accélération angulaire \[ (\text{rad.s}^{-2}) \]
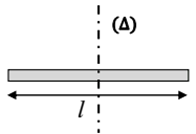
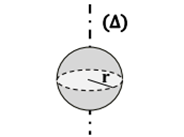
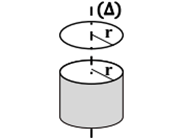
Expression du moment d’inertie de quelques solides
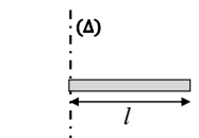
| Tige (axe passant par une extrémité) | Tige (axe passant par le centre) | Sphère pleine | Disque ou cylindre plein | Anneau ou cylindre creux |
|---|---|---|---|---|
\[
J_{\Delta}
=
\frac{1}{3}ml^2
\]
|
\[
J_{\Delta}
=
\frac{1}{12}ml^2
\]
|
\[
J_{\Delta}
=
\frac{2}{5}mr^2
\]
|
\[
J_{\Delta}
=
\frac{1}{2}mr^2
\]
|
\[
J_{\Delta}
=
mr^2
\]
|