

Travail d’une force – translation & rotation | 2BAC SPF
Travail d’une force
Le travail d’une force traduit le transfert d’énergie associé au déplacement de son point d’application. Selon la nature du mouvement (translation ou rotation) et la constance (ou non) de la force (ou du moment), on distingue plusieurs expressions.
📌 1.4 Cas de la translation
a) Force constante
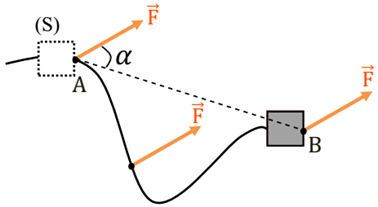
Pour une force constante \(\vec{F}\) appliquée à un solide en translation entre deux points A et B :
où \(\alpha\) est l’angle entre \(\vec{F}\) et le déplacement \(\vec{AB}\).
\( W_{AB}(\vec{P}) = m\,g\,(z_A – z_B) \)
(indépendant du chemin suivi, ne dépend que de la différence d’altitude).
b) Force non constante
Si la force varie au cours du déplacement, le travail est obtenu par intégration le long de la trajectoire :
\(\vec{T} = -k\,x\,\vec{i}\) (ressort). Déplacement de \(x_A\) à \(x_B\) : \[ W_{AB}(\vec{T}) = \int_{x_A}^{x_B} (-k\,x)\,dx = -\frac{1}{2}k\,(x_B^2 – x_A^2) \] \[ W_{AB}(\vec{T}) = \frac{1}{2}k\,x_A^2 – \frac{1}{2}k\,x_B^2 \]
🔄 1.5 Cas de la rotation
Pour un solide en rotation autour d’un axe fixe \(\Delta\), le travail d’une force est relié au moment de cette force par rapport à l’axe.
a) Moment constant
Si le moment \(\mathcal{M}_\Delta(\vec{F})\) est constant sur l’angle de rotation \(\Delta\theta = \theta_2 – \theta_1\) :
Le travail est le produit du moment (constant) par l’angle balayé (en radians).
b) Moment non constant
Lorsque le moment dépend de la position angulaire \(\theta\) :
\(\mathcal{M}_\Delta(C) = -C\,\theta\) (fil de torsion). De \(\theta_1\) à \(\theta_2\) : \[ W_t = \int_{\theta_1}^{\theta_2} (-C\,\theta)\,d\theta = -C\left[\frac{\theta^2}{2}\right]_{\theta_1}^{\theta_2} \] \[ W_t = \frac{1}{2}C\,(\theta_1^2 – \theta_2^2) = \frac{1}{2}C\,\theta_1^2 – \frac{1}{2}C\,\theta_2^2 \] (forme analogue au travail du ressort en translation)
- Force \(\vec{F}\) → travail \(W = \vec{F}\cdot\vec{d}\) (constante)
- Force variable → \(W = \int \vec{F}\cdot d\vec{\ell}\)
- Ressort : \(W = \frac{1}{2}k x_A^2 – \frac{1}{2}k x_B^2\)
- Moment \(\mathcal{M}_\Delta\) → travail \(W = \mathcal{M}_\Delta \cdot \Delta\theta\) (constant)
- Moment variable → \(W = \int \mathcal{M}_\Delta \, d\theta\)
- Torsion : \(W = \frac{1}{2}C \theta_1^2 – \frac{1}{2}C \theta_2^2\)
Exemples :
• Poids → \(E_p = mgz\) ; \(W(\vec{P}) = mg(z_A – z_B) = -(mg z_B – mg z_A) = -\Delta E_p\)
• Ressort → \(E_{pe} = \frac{1}{2}kx^2\) ; \(W(\vec{T}) = \frac{1}{2}k x_A^2 – \frac{1}{2}k x_B^2 = -\Delta E_{pe}\)
• Torsion → \(E_{pt} = \frac{1}{2}C \theta^2\) ; \(W_t = \frac{1}{2}C \theta_1^2 – \frac{1}{2}C \theta_2^2 = -\Delta E_{pt}\)
• Travail d’une force constante (translation) : \(W = \vec{F}\cdot\vec{AB}\)
• Travail du poids : \(W = mg(z_A – z_B)\)
• Travail de la force de rappel : \(W = \frac{1}{2}k x_A^2 – \frac{1}{2}k x_B^2\)
• Travail d’un couple de moment constant : \(W = \mathcal{M}_\Delta \cdot \Delta\theta\)
• Travail du couple de torsion : \(W = \frac{1}{2}C \theta_1^2 – \frac{1}{2}C \theta_2^2\)