

Pendule élastique – étude complète | 2BAC SPF
Pendule élastique
Système solide-ressort — équation différentielle, solution, période propre et exercice d’application.
2. Étude de systèmes mécaniques oscillants
2.1 Pendule élastique
Un pendule élastique (ou système solide-ressort) est constitué d’un solide de masse m fixé à un ressort.
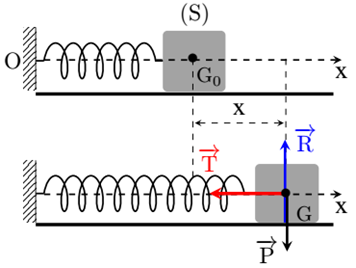
- Système étudié : { le solide (S) }
- Référentiel : terrestre supposé galiléen.
- Bilan des forces :
- \(\vec{P}\) : poids
- \(\vec{R}\) : réaction du plan (support horizontal)
- \(\vec{T}\) : force de rappel du ressort → \(\vec{T} = -k\,x\,\vec{i}\) (loi de Hooke)
2ᵉ loi de Newton : \(\vec{P} + \vec{R} + \vec{T} = m\,\vec{a}_G\)
Projection sur l’axe (Ox) horizontal :
⇒ Équation différentielle d’un oscillateur harmonique.
La solution générale s’écrit :
- \(X_m\) : amplitude (m) – valeur maximale de l’élongation
- \(T_0\) : période propre des oscillations (s)
- \(\varphi\) : phase à l’origine (rad)
- \(x(t)\) : abscisse du mobile à l’instant \(t\).
En dérivant deux fois l’expression horaire :
\(\ddot{x}(t) = -X_m \left(\frac{2\pi}{T_0}\right)^2 \cos\!\left(\frac{2\pi}{T_0}t+\varphi\right) = -\left(\frac{2\pi}{T_0}\right)^2 x(t)\)
En reportant \(\ddot{x}\) dans l’équation différentielle \(\ddot{x} + \frac{k}{m}x = 0\) :
✔ La période propre ne dépend que de la masse \(m\) et de la raideur \(k\) du ressort.
📝 Exercice d’application – Pendule élastique vertical
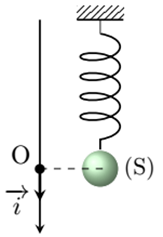
Énoncé : On considère un pendule élastique vertical constitué d’un ressort à spires non jointives (raideur \(k = 20\ \text{N·m}^{-1}\)) et d’un solide (S) de masse \(m = 200\ \text{g}\). On écarte le solide verticalement vers le bas d’une distance de 3 cm, puis on le libère sans vitesse initiale.
Repère (O, \(\vec{i}\)) vertical dirigé vers le bas, origine O confondue avec le centre d’inertie du solide à l’équilibre.
À \(t = 0\), le solide (S) passe par sa position d’équilibre stable \(G_0\) dans le sens positif.
Donnée : \(g = 10\ \text{N·kg}^{-1}\).
\(P = T_{eq} \quad\Rightarrow\quad m g = k\,\Delta\ell_{eq}\)
\[ \Delta\ell_{eq} = \frac{m g}{k} \] Application numérique : \(m = 0,200\ \text{kg}\), \(k = 20\ \text{N/m}\), \(g = 10\) → \(\Delta\ell_{eq} = \frac{0,200\times 10}{20} = 0,10\ \text{m} = 10\ \text{cm}\).
Forces : poids \(mg\) (vers le bas) et tension du ressort \(T = -k(x + \Delta\ell_{eq})\) dans le repère relatif.
En appliquant la 2ème loi de Newton : \(m\ddot{x} = mg – k(x + \Delta\ell_{eq})\).
Or à l’équilibre \(mg = k\Delta\ell_{eq}\), donc \(m\ddot{x} = -k x\).
\[ \boxed{\ddot{x} + \frac{k}{m}\,x = 0} \] Avec \(k/m = 20 / 0,200 = 100\ \text{rad}^2/\text{s}^2\).
Conditions initiales : à \(t=0\), \(x(0) = 0\) (passage par la position d’équilibre) et le solide se déplace dans le sens positif ⇒ vitesse \(v(0) > 0\).
\(x(0) = X_m \cos\varphi = 0 \Rightarrow \cos\varphi = 0 \Rightarrow \varphi = \pm \frac{\pi}{2}\).
Vitesse : \(v(t) = -X_m \omega_0 \sin(\omega_0 t + \varphi)\).
À \(t=0\) : \(v(0) = -X_m \omega_0 \sin\varphi\). Pour que \(v(0) > 0\) et \(X_m>0\), \(\sin\varphi\) doit être négatif.
Donc \(\varphi = -\frac{\pi}{2}\) (car \(\sin(-\pi/2) = -1\) → \(v(0) = -X_m\omega_0(-1) = X_m\omega_0 >0\)).
Amplitude \(X_m = 3\ \text{cm} = 0,03\ \text{m}\) (écartement initial puis lâcher sans vitesse depuis la position basse correspond à l’amplitude maximale).
\[ x(t) = 0,03 \cos\!\left(10\,t – \frac{\pi}{2}\right)\ \text{m} \] Soit encore \(x(t) = 0,03 \sin(10\,t)\) (car \(\cos(\theta-\pi/2) = \sin\theta\)).
\[ T_0 = 0,2\pi \approx 0,628\ \text{s} \] Fréquence propre : \(\displaystyle f_0 = \frac{1}{T_0} = \frac{1}{0,2\pi} = \frac{5}{\pi}\ \text{Hz} \approx 1,59\ \text{Hz}\).
• Équation différentielle : \(\ddot{x} + \omega_0^2\,x = 0\) avec \(\omega_0 = \sqrt{k/m}\).
• Période propre : \(T_0 = 2\pi\sqrt{m/k}\).
• Solution : \(x(t) = X_m \cos(\omega_0 t + \varphi)\) → \(X_m\) et \(\varphi\) déterminés par les conditions initiales.
• Fréquence propre : \(f_0 = \frac{1}{T_0} = \frac{1}{2\pi}\sqrt{\frac{k}{m}}\).
• Indépendance : \(T_0\) ne dépend ni de \(g\) (pour un ressort horizontal), ni de l’amplitude (isochronisme des petites oscillations).