

Lois de Newton – Repérage et trajectoire
Lois de Newton
① Repérage d’un point G d’un mobile – vecteur position
Nous savons que le mouvement d’un corps est relatif à la référence choisie, c’est-à-dire que les corps ne se déplacent que par rapport à d’autres corps.
Donc pour étudier le mouvement d’un point G d’un solide, on choisit deux repères reliés à un référentiel :
- Repère d’espace \( \mathcal{R}(O, \vec{i}, \vec{j}, \vec{k}) \).
- Repère de temps : un chronomètre dont l’origine des dates est \( t = 0 \) et d’unité la seconde (s).
La position du centre d’inertie \( G \) d’un système (S) est repérée à chaque instant par un vecteur appelé le vecteur position \( \overrightarrow{OG} \) tel que dans le repère cartésien \( \mathcal{R}(O, \vec{i}, \vec{j}, \vec{k}) \) :

La norme du vecteur position (la distance \( OG \)) est donnée par :
Avec : \( x, y \) et \( z \) les coordonnées du point G dans le repère orthonormé \( \mathcal{R}(O, \vec{i}, \vec{j}, \vec{k}) \) et \( \vec{i}, \vec{j} \) et \( \vec{k} \) des vecteurs unitaires de norme égale à 1.
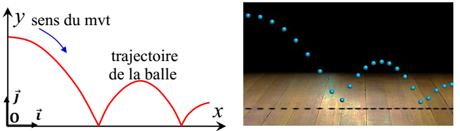
② Trajectoire
La trajectoire d’un point mobile G dans un repère donné est une ligne formée par l’ensemble des positions occupées par G lors de son mouvement.
La trajectoire du point G est orientée par le sens de mouvement du mobile.
Cinématique – Vitesse et accélération
01 Vecteur vitesse instantanée
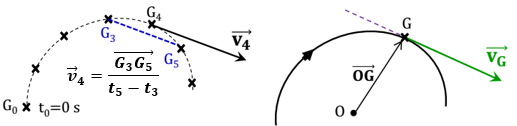
Dans un repère donné, le vecteur vitesse instantanée du centre d’inertie G d’un mobile est la dérivée par rapport au temps du vecteur position \(\overrightarrow{OG}\) :
Les caractéristiques du vecteur vitesse instantanée sont :
- Direction : tangent à la trajectoire au point G à l’instant t.
- Sens : sens du mouvement.
- Norme \(|\vec{v}_G|\) : valeur de la vitesse à l’instant t en (m.s\(^{-1}\)).
L’expression de \(\vec{v}_G\) dans le repère \((O, \vec{i}, \vec{j}, \vec{k})\) est :
Avec :
La norme du vecteur vitesse est :
02 Vecteur accélération
01 Notion d’accélération
On considère une voiture qui se déplace le long d’un trajet rectiligne, et passe d’une vitesse de \(v_1 = 26 \, m.s^{-1}\) à une vitesse \(v_2 = 30 \, m.s^{-1}\) pendant la durée \(\Delta t = t_2 – t_1 = 2 \, s\). On dit que la vitesse de la voiture a augmenté, cette augmentation de la vitesse est appelée accélération de valeur :
02 Vecteur accélération instantanée
Le vecteur accélération instantanée du centre d’inertie G d’un mobile est égal à la dérivée par rapport au temps du vecteur vitesse instantanée de son centre d’inertie G :
(a) Dans un repère cartésien
L’expression de \(\vec{a}_G\) dans le repère cartésien \((O, \vec{i}, \vec{j}, \vec{k})\) est :
Avec :
La norme du vecteur accélération est :
(b) Dans un repère de Frenet
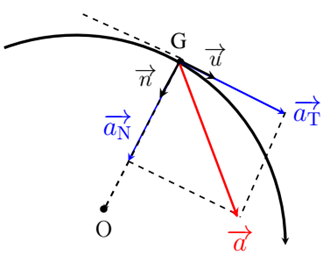
Le repère de Frenet est un repère mobile lié au point G, son origine est le point G et ses vecteurs unitaires sont :
- \(\vec{u}\) : tangent à la trajectoire et dirigé dans le sens du mouvement
- \(\vec{n}\) : normal à la trajectoire et dirigé vers l’intérieur de la concavité de la trajectoire
L’accélération dans la base de Frenet est donnée par :
\( a_T = \frac{dv}{dt} \) : accélération tangentielle
\( a_N = \frac{v^2}{\rho} \) : accélération normale ; avec \( \rho \) : le rayon de courbure de la trajectoire au point \( G \)
\[ \rho = R \]