

Mouvement rectiligne – Projection de forces
4 Mouvement rectiligne uniforme et mouvement rectiligne uniformément varié
Mouvement rectiligne : La trajectoire de G est une droite parallèle par exemple à l’axe (Ox).
\[ \overrightarrow{OG} = x \cdot \vec{i} \quad \text{et} \quad \overrightarrow{v} = v_x \cdot \vec{i} = \dot{x} \cdot \vec{i} \quad \text{et} \quad \vec{a} = a_x \cdot \vec{i} = \ddot{x} \cdot \vec{i} \]
4.1 Mouvement rectiligne uniforme
Mouvement rectiligne uniforme : La trajectoire est rectiligne et la vitesse est constante :
- \( v_G = \text{cte} \)
- \( a_G = 0 \)
Équation horaire du mouvement :
\[ x(t) = v_G \cdot t + x_0 \quad \text{avec } x_0 = x(t = 0) \]
4.2 Mouvement rectiligne uniformément varié
Mouvement rectiligne uniformément varié : La trajectoire est rectiligne et l’accélération est constante :
- \( a_G = \text{cte} \)
Équation de la vitesse :
\[ v_G(t) = a_G \cdot t + v_0 \quad \text{avec } v_0 = v_G(t = 0) \]
Équation horaire du mouvement :
\[ x(t) = \frac{1}{2} \cdot a_G \cdot t^2 + v_0 \cdot t + x_0 \quad \text{avec } x_0 = x(t = 0) \]
Rappel sur la projection :
Force perpendiculaire – parallèle à un axe
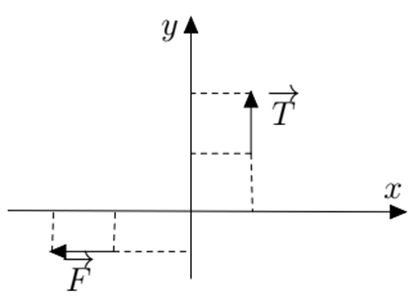
\[ \vec{F} \left\{
\begin{aligned}
F_x &= -F : \text{projection de } \vec{F} \text{ sur l’axe (Ox)} \\
F_y &= 0 : \text{projection de } \vec{F} \text{ sur l’axe (Oy)}
\end{aligned}
\right.
\]
\[ \vec{T} \left\{
\begin{aligned}
T_x &= 0 : \text{projection de } \vec{T} \text{ sur l’axe (Ox)} \\
T_y &= +T : \text{projection de } \vec{T} \text{ sur l’axe (Oy)}
\end{aligned}
\right.
\]
Force oblique
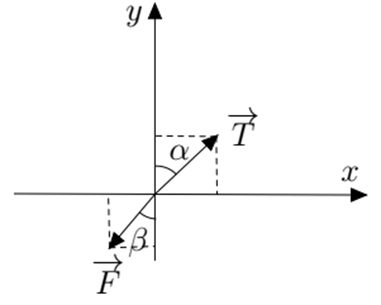
\[ \vec{F} \left\{
\begin{aligned}
F_x &= -F \cdot \sin \beta : \text{projection de } \vec{F} \text{ sur l’axe (Ox)} \\
F_y &= -F \cdot \cos \beta : \text{projection de } \vec{F} \text{ sur l’axe (Oy)}
\end{aligned}
\right.
\]
\[ \vec{T} \left\{
\begin{aligned}
T_x &= +T \cdot \sin \alpha : \text{projection de } \vec{T} \text{ sur l’axe (Ox)} \\
T_y &= +T \cdot \cos \alpha : \text{projection de } \vec{T} \text{ sur l’axe (Oy)}
\end{aligned}
\right.
\]
💡 Rappel trigonométrique :
- \(\sin \theta = \frac{\text{côté opposé}}{\text{hypoténuse}}\)
- \(\cos \theta = \frac{\text{côté adjacent}}{\text{hypoténuse}}\)
- \(\tan \theta = \frac{\sin \theta}{\cos \theta}\)
📊 Tableau récapitulatif des mouvements rectilignes
| Type de mouvement | Vitesse \(v(t)\) | Accélération \(a\) | Position \(x(t)\) |
|---|---|---|---|
| Uniforme (MRU) | \(v = \text{cte}\) | \(a = 0\) | \(x = v \cdot t + x_0\) |
| Uniformément varié (MRUV) | \(v(t) = a \cdot t + v_0\) | \(a = \text{cte}\) | \(x(t) = \frac{1}{2} a t^2 + v_0 t + x_0\) |