

Pendule simple – étude complète
Pendule simple
2.4 Pendule simple
Malgré son caractère idéal, ce modèle décrit avec une excellente approximation le mouvement de nombreux systèmes réels (balancier d’horloge, balançoire, etc.) pour des amplitudes angulaires modérées.
Système étudié : { le solide (S) } – masse ponctuelle \(m\).
Référentiel : terrestre supposé galiléen.
Bilan des forces :
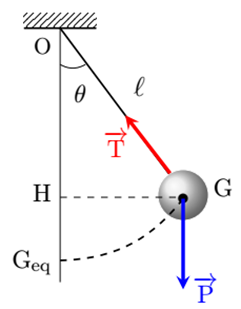
- \(\vec{P}\) : poids du solide, vertical vers le bas.
- \(\vec{T}\) : tension du fil (force de liaison dirigée le long du fil).
On étudie la rotation autour de l’axe \(\Delta\) (axe horizontal passant par le point de suspension O). La position est repérée par l’angle \(\theta\) entre le fil et la verticale descendante.
Relation fondamentale de la dynamique pour la rotation autour de \(\Delta\) :
- \( M_{\Delta}(\vec{T}) = 0 \) car la droite d’action de \(\vec{T}\) passe par l’axe \(\Delta\) (moment nul).
- \( M_{\Delta}(\vec{P}) = -\,P \cdot HG = -\, m\,g\,\ell \,\sin\theta \)
où \(\ell = OG\) est la longueur du pendule et \(HG = \ell \sin\theta\) est le bras de levier du poids par rapport à \(\Delta\).
Le moment d’inertie de la masse ponctuelle par rapport à \(\Delta\) vaut \(J_{\Delta} = m\,\ell^{2}\). En reportant :
Après simplification par \(m\ell\) (non nul) :
C’est l’équation d’un oscillateur harmonique angulaire de pulsation propre \(\omega_0 = \sqrt{\dfrac{g}{\ell}}\).
La solution générale de \(\ddot{\theta} + \omega_0^2 \theta = 0\) est une fonction sinusoïdale :
- \(\theta_m\) : amplitude angulaire (rad) – dépend des conditions initiales (écartement initial).
- \(T_0\) : période propre des petites oscillations (s).
- \(\varphi\) : phase à l’origine (rad).
Par identification avec \(\omega_0 = \dfrac{2\pi}{T_0} = \sqrt{\dfrac{g}{\ell}}\), on obtient :
avec :
- \(\ell\) : longueur du pendule (m).
- \(g\) : intensité de la pesanteur (N/kg ou m/s²).
Remarques importantes :
→ La période propre est indépendante de la masse \(m\) (tous les pendules simples de même longueur oscillent à la même fréquence, quelle que soit leur masse).
→ Elle est indépendante de l’amplitude dans la limite des petites oscillations (isochronisme des petites oscillations).
→ \(T_0\) augmente avec la longueur du fil et diminue si \(g\) augmente.
Vérifions que l’expression \(\displaystyle T_0 = 2\pi \sqrt{\frac{\ell}{g}}\) a bien la dimension d’un temps :
\( [g] = \text{L} \cdot \text{T}^{-2} \quad (\text{accélération}) \)
\( \left[ \frac{\ell}{g} \right] = \frac{\text{L}}{\text{L}\cdot\text{T}^{-2}} = \text{T}^{2} \)
\( \left[ \sqrt{\frac{\ell}{g}} \right] = \text{T} \)
\( [T_0] = \text{T} \)
La période propre s’exprime bien en secondes (s). L’analyse dimensionnelle confirme la cohérence de la formule.
• Fil strictement inextensible et sans masse.
• Masse ponctuelle (pas de dimension).
• Frottements négligés (oscillations non amorties).
• Champ de pesanteur uniforme et constant.
En réalité, pour des amplitudes non négligeables (\(\theta > 15^\circ\)), la période augmente légèrement et dépend de \(\theta_m\). La formule \(T_0 = 2\pi\sqrt{\ell/g}\) reste une excellente approximation pour les petits angles.
📐 Exemple numérique :
Un pendule simple a une longueur \(\ell = 1,00\ \text{m}\). Sur Terre (\(g \approx 9,81\ \text{m/s}^2\)) :
\(T_0 = 2\pi \sqrt{\dfrac{1,00}{9,81}} \approx 2\pi \times 0,319 \approx 2,01\ \text{s}\).
Sur la Lune (\(g \approx 1,62\ \text{m/s}^2\)) : \(T_0 = 2\pi \sqrt{1,00/1,62} \approx 2\pi \times 0,786 \approx 4,94\ \text{s}\).
→ La période est plus longue sur la Lune car la pesanteur est plus faible.